
(Indoor) Localization
In contrast to satellite-based outdoor positioning systems that have been around for several decades, indoor applications have not seen generic, robust solutions yet. The reason lies in fundamental technical and physical challenges. At a first glance, radio frequency (RF) signals seem to be a very promising measurement technology to provide the geometry-related raw data for the positioning system. They can penetrate materials, propagate over large distances, and transceivers can be implemented at low cost, small size, and with low power consumption.
However, multipath propagation makes it extremely challenging to acquire precise distance or angle measurements in indoor environments. It is imperative to use (ultra)-wide bandwith (UWB) signals to be able to separate the direct signal from multipath components. And even if UWB signals are used, one faces the risk that the line-of-sight signal is obstructed, which can lead to great offsets in the range or angle fixes.
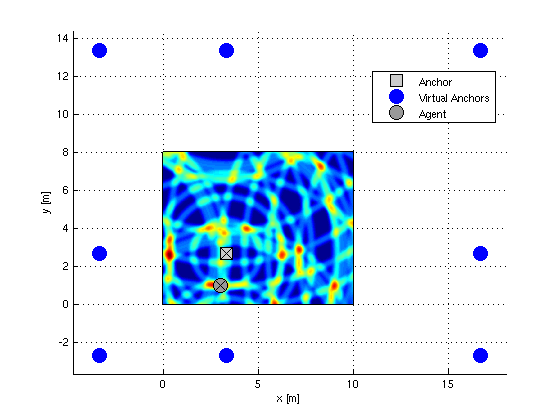
Our research - next to fundamental work on ranging - has been focused on two approaches to cope with the non-line-of-sight challenge. Cooperative localization (in ad-hoc sensor networks) employs communication among sensor nodes to maximize the information available for solving the localization problem. The second approach proposes to actively exploit reflected multipath components. Assuming that the underlying geometry is known, each reflection yields additional information related to the mobile’s location. A firm understanding of the (UWB) wireless channel is the basis for much of our research.