
Graph-based Simultaneous Localization and Bias Tracking
- Published
- Mon, Apr 01, 2024
- Tags
- rotm
- Contact
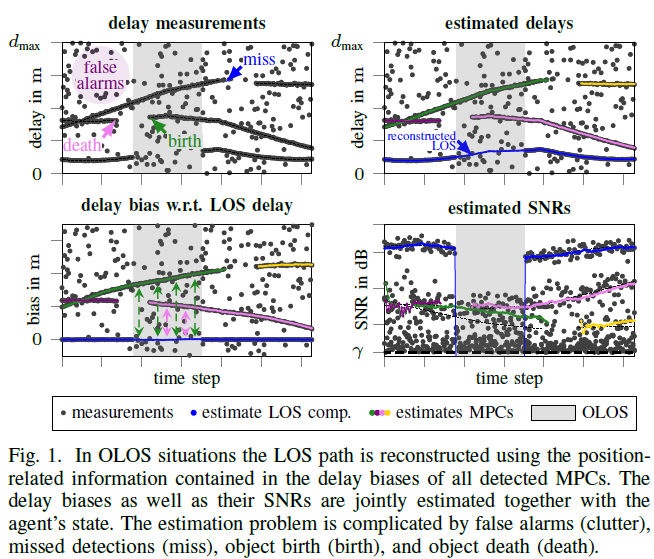
We present a factor graph formulation and particlebased sum-product algorithm for robust localization and tracking in multipath-prone environments. The proposed sequential algorithm jointly estimates the mobile agent’s position together with a time-varying number of multipath components (MPCs). The MPCs are represented by “delay biases” corresponding to the offset between line-of-sight (LOS) component delay and the respective delays of all detectable MPCs. The delay biases of the MPCs capture the geometric features of the propagation environment with respect to the mobile agent. Therefore, they can provide position-related information contained in the MPCs without explicitly building a map of the environment. We demonstrate that the position-related information enables the algorithm to provide high-accuracy position estimates even in fully obstructed line-of-sight (OLOS) situations. Using simulated and real measurements in different scenarios we demonstrate the proposed algorithm to significantly outperform state-of-the-art multipath-aided tracking algorithms and show that the performance of our algorithm constantly attains the posterior Cram´er- Rao lower bound (P-CRLB). Furthermore, we demonstrate the implicit capability of the proposed method to identify unreliable measurements and, thus, to mitigate lost tracks.
The paper has been accepted for publication in the IEEE Transactions on Wireless Communications. If you are interested have a look here.
Browse the Results of the Month archive.