
Message Passing-Based 9-D Cooperative Localization and Navigation with Embedded Particle Flow
- Published
- Wed, Feb 01, 2023
- Tags
- rotm
- Contact
This paper derives the messages of belief propagation (BP) for cooperative localization by means of particle flow, leading to the development of a distributed particle-based message-passing algorithm which avoids particle degeneracy. Our combined particle flow-based BP approach allows the calculation of highly accurate proposal distributions for agent states with a minimal number of particles. It outperforms conventional particle-based BP algorithms in terms of accuracy and runtime. Furthermore, we compare the proposed method to a centralized particle flow-based implementation, known as the exact Daum-Huang filter, and to sigma point BP in terms of position accuracy, runtime, and memory requirement versus the network size. We further contrast all methods to the theoretical performance limit provided by the posterior Cramer-Rao lower bound. Based on three different scenarios, we demonstrate the superiority of the proposed method.
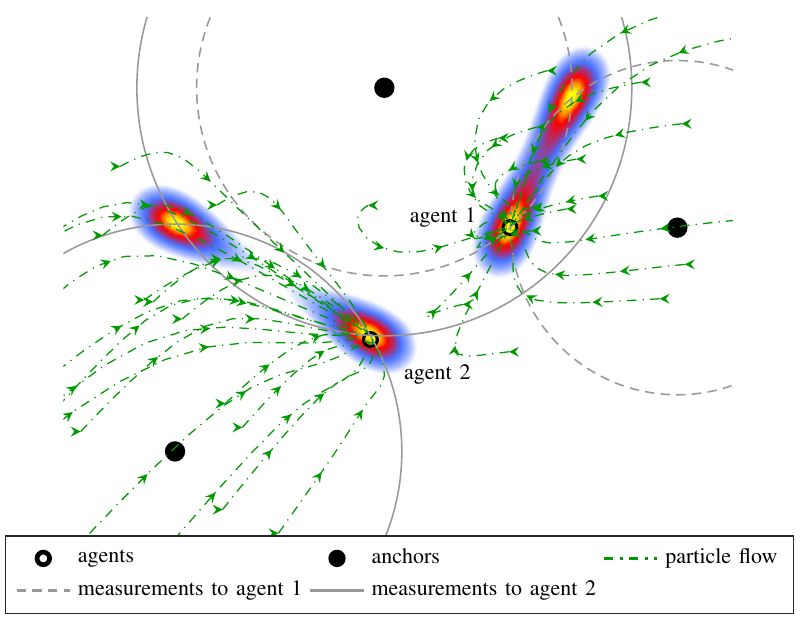
Figure: Visualization of the particle flow (dash-dotted green lines) of two cooperating agents in the vicinity of three anchors. Each agent has only connections to two anchors (grey circles) indicated by the multimodal PDF of the agent positions (color map).
Browse the Results of the Month archive.