
Regularizing PINNs against Unstable Fixed Points
- Published
- Fri, May 01, 2026
- Tags
- rotm
- Contact
Physics-informed neural networks (PINNs) suffer from training issues if they are used to learn the solution to a differential equation given only initial and boundary conditions. Previous work has shown that, among other causes, fixed points of differential equations can significantly affect training behavior. Specifically, any fixed point solution is a global minimum of the physics loss that is used to regularize PINNs. Hence, if during training the PINN solution comes close to a fixed point solution, this latter solution can become a local minimmum in the loss landscape in which the PINN gets stuck. This issue becomes critical if these fixed point solutions are unstable, effectively rendering the PINN behavior unphysical.
In this work, we propose a regularization scheme for PINN training that makes use of stability theory for ordinary differential equations. Indeed, we propose to penalize candidate solutions that correspond to unstable fixed points. We do this by evaluating the eigenvalues of the linearization of the system of ordinary differential equations, and penalizing candidate solutions for which some of these eigenvalues are positive.
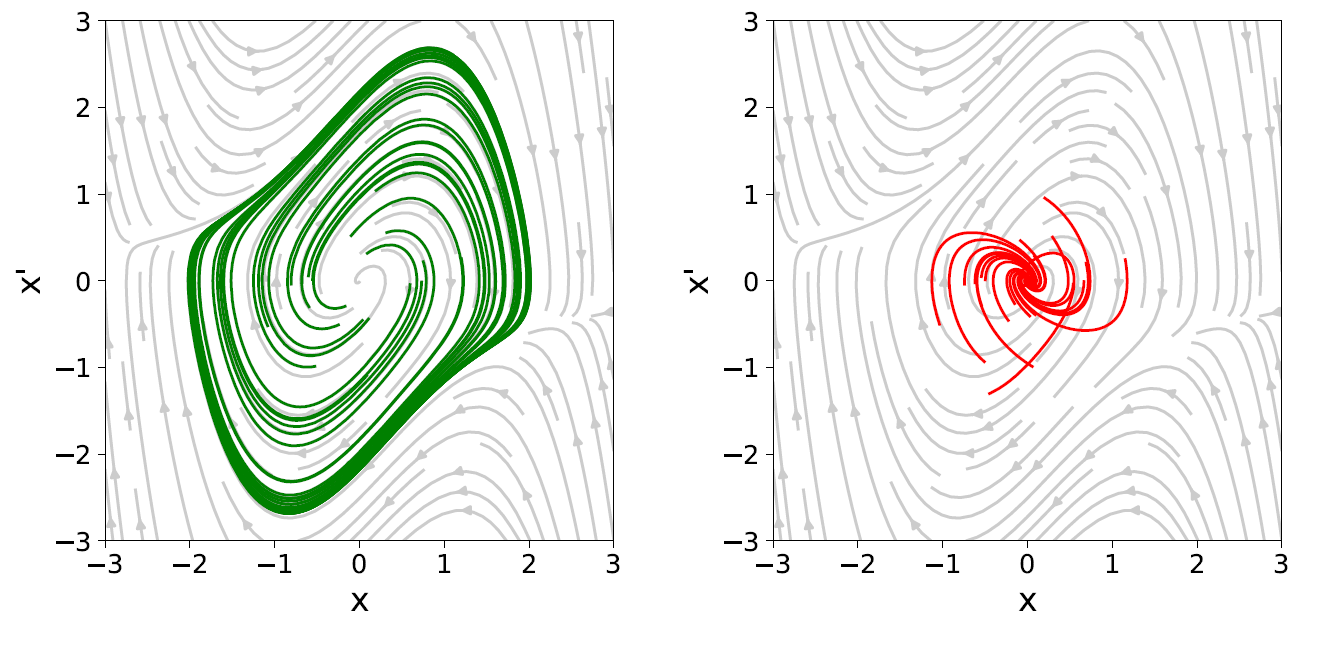
The figure above shows the trajectories of a van der Pol oscillator in phase space, for 20 different randomly drawn initial conditions. Training a PINN on this system with the aim of simulating the oscillator for T=15 fails without regularization (left), as all candidate solutions found by the trained PINN converge to the unstable fixed point at (0,0). In contast, with regularization (right), training is successful and the PINN delivers candidate solutions in agreement with the governing equation. Similar results were obtained for the unforced Duffing oscillator and the Lotka-Volterra system.
The paper is available on arXiv and has recently won the Best Paper Award at the Austrian Symposium on AI, Robotics and Vision (AIRoV).
Browse the Results of the Month archive.