
An Adaptive Algorithm for Joint Cooperative Localization and Orientation Estimation using Belief Propagation
- Published
- Wed, Dec 01, 2021
- Tags
- rotm
- Contact
In cooperative localization applications, measurement-model related model parameters are often assumed to be known even though they can depend strongly on the environment. This assumption can lead to a reduced localization accuracy due to parameter mismatch. In this paper, we propose an adaptive factor-graph-based algorithm for joint cooperative localization and orientation estimation which inherently estimates all unknown model parameters as well as the measurement uncertainty. We use RSS radio measurements and account for the directivity of the antennas with a parametric antenna pattern. We validate our proposed methods with simulations in a static scenario and show that there is only a small loss in positioning accuracy compared to known model parameters and measurement noise.
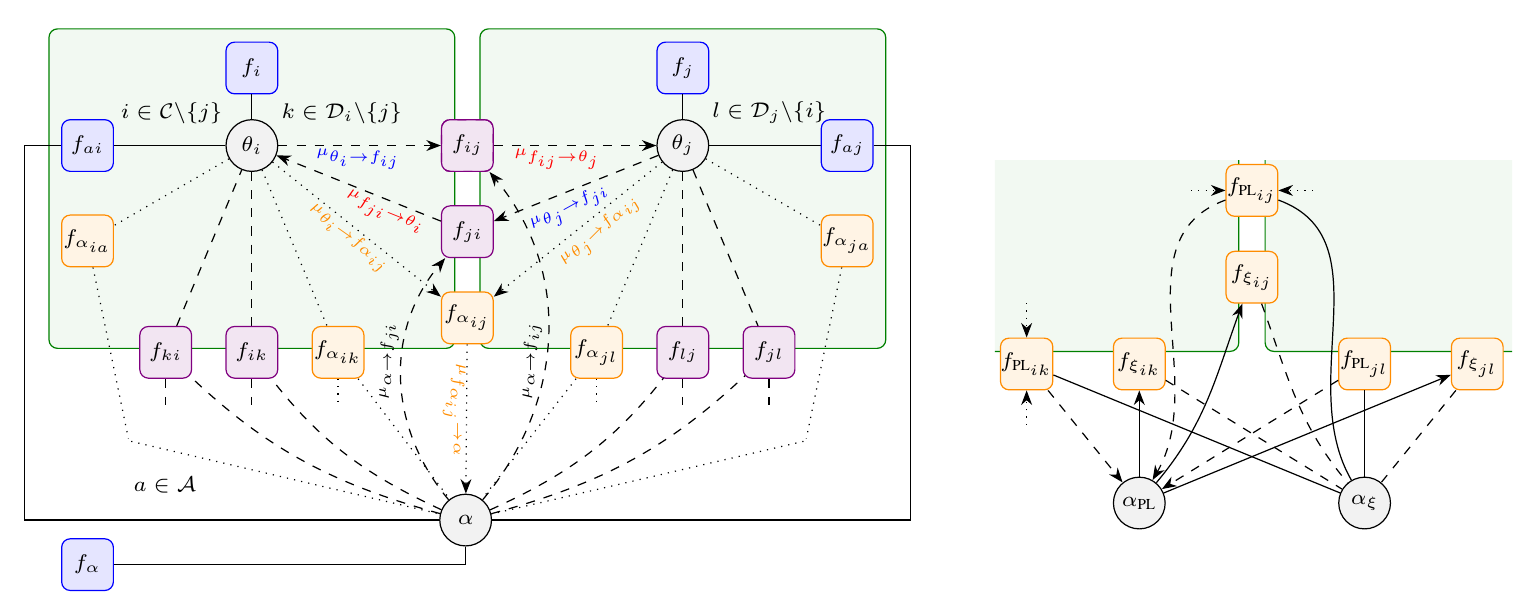
Figure: This figure shows a FG for joint cooperative localization and model parameter estimation. The left Figure shows the FG where all model parameters are captured in one node whereas the left figure shows how variable node alpha can be further factorized. Factors in purple are involved in updates of the agent states whereas factors in yellow are involved in updates of the parameter state. Factors in blue correspond to prior knowledge and information from anchors.
Browse the Results of the Month archive.