
Data Fusion for Multipath-Based SLAM
- Published
- Thu, Apr 01, 2021
- Tags
- rotm
- Contact
Multipath-based simultaneous localization and mapping (SLAM) algorithms can detect and localize radio reflective surfaces and jointly estimate the time-varying position of mobile agents. A promising approach is to represent radio reflective surfaces by so called virtual anchors (VAs). In existing multipathbased SLAM algorithms, VAs are modeled and inferred for each physical anchor (PA) and each propagation path individually, even if multiple VAs represent the same physical surface. This limits timeliness and accuracy of mapping and agent localization. In this paper, we introduce an improved statistical model and estimation method that enables data fusion for multipath-based SLAM by representing each surface with a single master virtual anchor (MVA). Our numerical simulation results show that the proposed multipath-based SLAM algorithm can significantly increase map convergence speed and reduce the mapping error compared to a state-of-the-art method.
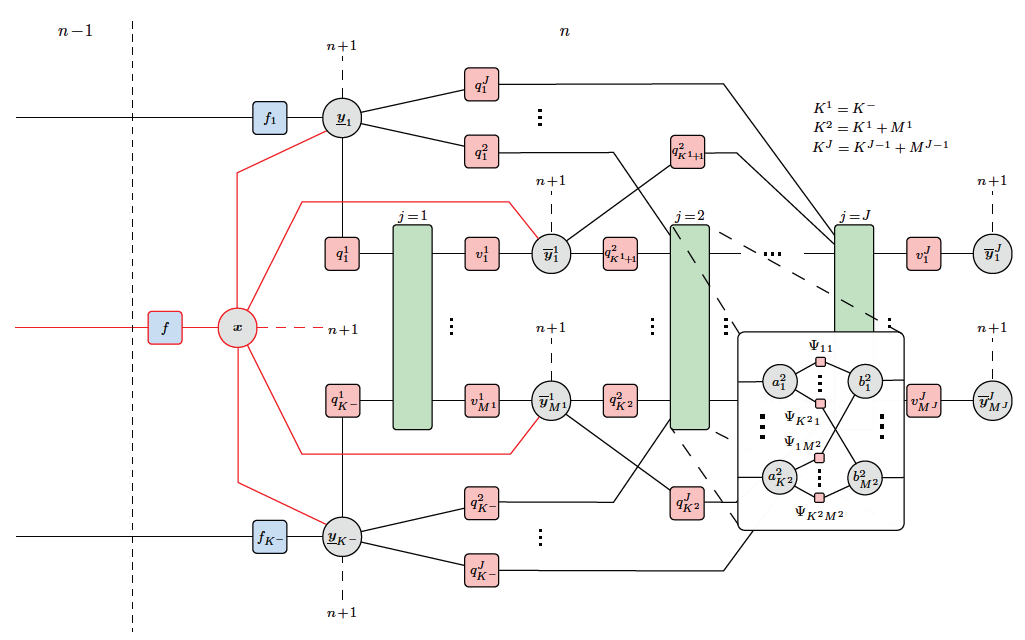
Figure: Factor graph for multipath-based SLAM corresponding to the factorization of the posterior PDF. Factor nodes in blue present the factors related to the state-transition function, factor nodes in red represent factors related to the likelihood function, the green boxes represent the sub-FGs related to the DA corresponding to the PAs, and the red edges are related to the agent state.
The full version will appear soon on IEEE Xplore and on Arxiv.
Browse the Results of the Month archive.