
CNNs for Interference Mitigation and Denoising in Automotive Radar Using Real-World Data
- Published
- Wed, Jul 01, 2020
- Tags
- rotm
- Contact
Radar sensors are crucial for environment perception of driver assistance systems as well as autonomous cars. Key performance factors are a fine range resolution and the possibility to directly measure velocity. With a rising number of radar sensors and the so far unregulated automotive radar frequency band, mutual interference is inevitable and must be dealt with. Sensors must be capable of detecting, or even mitigating the harmful effects of interference, which include a decreased detection sensitivity.
In this paper, we evaluate a Convolutional Neural Network (CNN)-based approach for interference mitigation on real-world radar measurements. We combine real measurements with simulated interference in order to create input-output data suitable for training the model. A finite sample size performance comparison shows the effectiveness of the model trained on either simulated or real data as well as for transfer learning. A comparative performance analysis with the state of the art emphasizes the potential of CNN-based models for interference mitigation and denoising of real-world measurements, also considering resource constraints of the hardware.
The full version of the paper can be found at https://ml4ad.github.io/files/papers/CNNs for Interference Mitigation and Denoising in Automotive Radar Using Real-World Data.pdf.
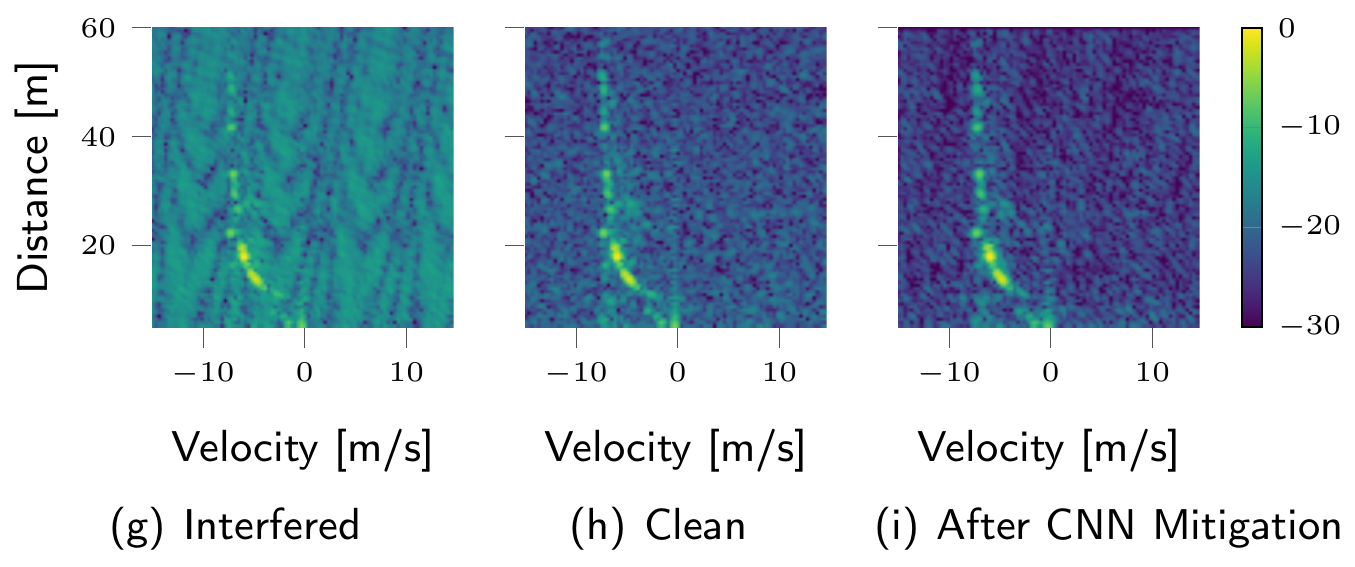
Figure: Exemplary measurement Range-Doppler magnitude spectra. On the left with interference, in the middle the “clean” measurement without interference and on the right after the CNN mitigation. The CNN-mitigated Range-Doppler map does not contain any interference structures and the noise floor is decreased, even in comparison with the clean measurement. The object peaks however are retained at their original positions and with the same relative intensity.
Browse the Results of the Month archive.