
Learning a Behavior Model of Hybrid Systems Through Combining Model-Based Testing and Machine Learning
- Published
- Wed, Apr 01, 2020
- Tags
- rotm
- Contact
Models play an essential role in the design process of cyber-physical systems. They form the basis for simulation and analysis and help in identifying design problems as early as possible. However, the construction of models that comprise physical and digital behavior is challenging. Consequently, there is considerable interest in learning the behavior of such systems using machine learning. However, the performance of the machine learning techniques depends crucially on sufficient and representative training data covering the behavior of the system adequately not only in standard situations, but also in edge cases that are often particularly important.
In this work, we successfully combine methods from automata learning and model-based testing to fully automatically generate training data that is rich of edge cases. Experimental results on a platooning scenario show that recurrent neural networks learned with this data achieved significantly better results compared to models learned from randomly generated data. In particular, the classification error for crash detection is reduced by a factor of five and a similar F1-score is obtained with up to three orders of magnitude fewer training samples. The full version of the paper can be found at https://arxiv.org/pdf/1907.04708.pdf.
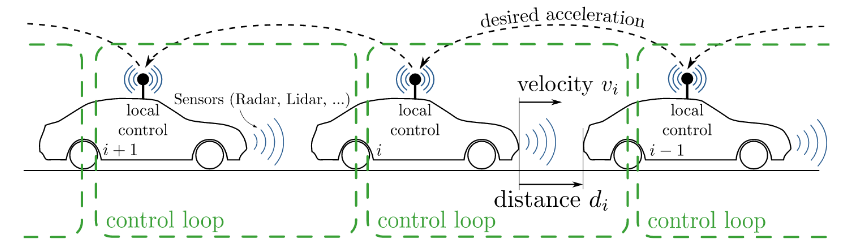
Figure: We illustrate our method using a platooning scenario where one is allowed to control the acceleration of the leading vehicle whereas the following vehicles are controlled by a black box whose behavior we want to learn. In our experiments we are especially concerned about the edge case of crashes, i.e., situations where the distance between two cars becomes too small.
Browse the Results of the Month archive.