
Complex Signal Denoising and Interference Mitigation for Automotive Radar Using Convolutional Neural Networks
- Published
- Sun, Sep 01, 2019
- Tags
- rotm
- Contact
Automotive radar is used to perceive the vehicle’s environment due to its capability to measure distance, velocity and angle of surrounding objects with a high resolution. With an increasing number of deployed radar sensors on the streets and because of missing regulations of the automotive radar frequency band, mutual interference must be dealt with in order to retain a sensitive detection capability.
In this work we analyze the capability of Convolutional Neural Networks (CNNs) to address the issue of interference mitigation. Since automotive radar is a safety-critical application, interference mitigation and denoising algorithms must fulfill certain requirements. Application-related performance metrics are used to analyze noise suppression capability and ensure that no artifacts are generated by the processing.
In this paper we
- show how NN-based denoising can applied in different steps of the radar signal processing chain.
- show specific CNN structures capable of denoising radar signals.
- present numerical results using application-related performance metrics in a comparison with the state of the art.
- show that an excellent level of noise reduction and hence an improvement of detection sensitivity can be achieved.
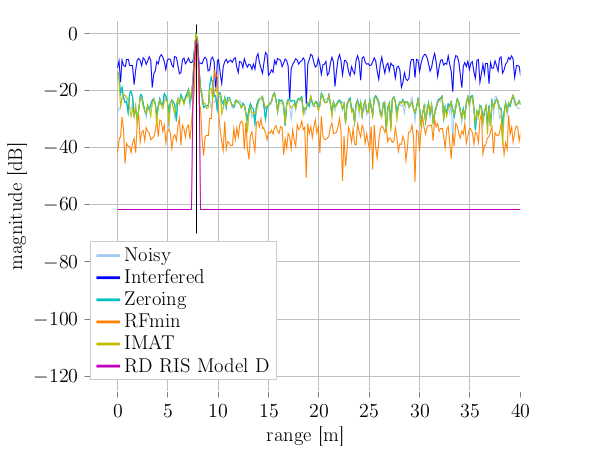
Figure: Range cut at velocity v = 5.5m/s, shown up to 40m. The object is located at a distance d = 7.9m as indicated by the vertical black marker. The noisy and interfered signals are included as a reference. Zeroing, RFmin and IMAt are classical interference mitigation methods, used for comparison. RD RIS Model D is the in our experiments best performing CNN model, it drops the noise floor to a constant level.
More information can be found in our paper and the code is available on github.
Browse the Results of the Month archive.