
Anchorless Cooperative Tracking Using Multipath Channel Information
- Published
- Thu, Mar 01, 2018
- Tags
- rotm
- Contact
Highly accurate location information is a key facilitator to stimulate future services for the commercial and public sectors. Positioning and tracking of absolute positions of wireless nodes usually requires information provided from technical infrastructure, e.g. satellites or fixed anchor nodes, whose maintenance is costly and whose limited operating coverage narrows the positioning service. In this paper we present an algorithm aiming at tracking of absolute positions without using information from fixed anchors, odometers or inertial measurement units. We perform radio channel measurements in order to exploit position-related information contained in multipath components (MPCs). Tracking of the absolute node positions is enabled by estimation of MPC parameters followed by association of these parameters to a floorplan. To account for uncertainties in the floorplan and for propagation effects like diffraction and penetration, we recursively update the provided floorplan using the measured MPC parameters. We demonstrate the ability to localize two agent nodes without the employment of further infrastructure, using data from ultra-wideband channel measurements. Further, we show the potential performance gain if also one fixed anchor is available and we validate the algorithm for a range of different signal bandwidths and number of nodes.
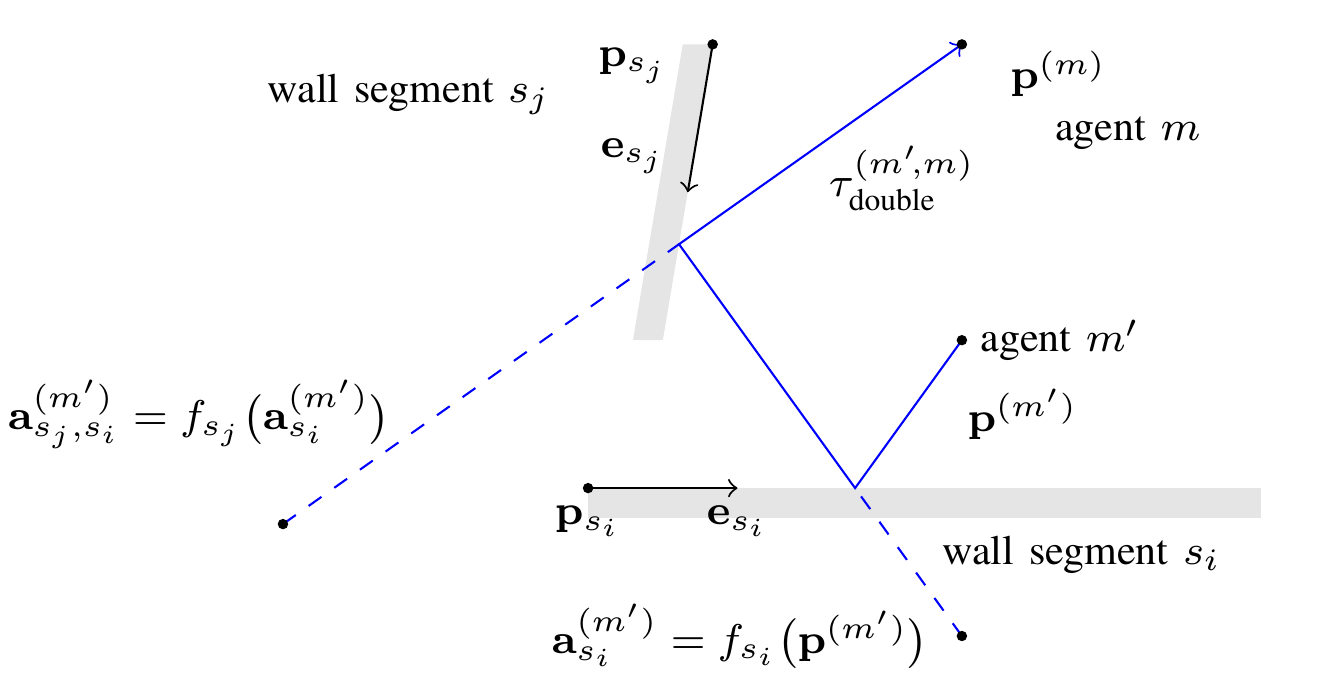
The figure shows an illustration of cooperative localization. Both agents m and m’ are uncertain regarding their position and exploit delay information covered in the double bounce reflection at wall segments i and j.
Our work is available online and will be published in IEEE Transactions on Wireless Communications.
Browse the Results of the Month archive.